
缪朝东机电技术名师工作室

加入时间:2022-05-25

加入时间:2022-05-25
加入时间:2022-05-25

加入时间:2022-05-25
加入时间:2022-05-25

加入时间:2022-05-25
加入时间:2022-05-25
加入时间:2023-04-12
加入时间:2022-05-25

加入时间:2022-05-25
加入时间:2022-05-25
加入时间:2022-05-25
加入时间:2022-05-25
加入时间:2022-05-25
当有多个异常状态要识别时,一般很难找到一个或多个可以辨别所有异常状态的特征参数![]() 。要解决这个问题,可以采用逐次诊断的方法。每次只分辨两种状态,且都通过振动信号提取最需要的特征参数做诊断,逐次诊断法思路如图3.9:
。要解决这个问题,可以采用逐次诊断的方法。每次只分辨两种状态,且都通过振动信号提取最需要的特征参数做诊断,逐次诊断法思路如图3.9:
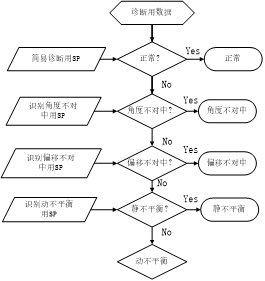
图3.9逐次诊断法
Fig.3.9 Flowchart of sequential diagnosis
针对某一状态未知的齿轮轴,第一步是判别齿轮轴是否存在故障,此时选用对正常与存在异常两类状态最敏感的特征参数作为辨识依据,对齿轮轴未知状态进行辨识,若齿轮轴诊断为正常状态则停止诊断;若特征参数显示状态存在异常,则选取对角度不对中敏感的特征参数进行诊断,若齿轮轴的诊断结果为角度不对中,则停止诊断;若特征参数显示不存在角度不对中异常,则针对下一个故障状态进行类似诊断… …直至找出齿轮轴的异常状态类别。逐次诊断法在面对多种未知异常状态的对象时,可以进行细致的逐一辨别,防止异常故障混淆,简化了多类故障同时诊断的问题,此方法的缺陷在于诊断对象只局限于已知故障特征参数的故障类型,其他位置故障无法测取。
进行诊断前需要将数据分成两类:一类用于学习,建立诊断模型;一类用于验证。对于正常(N)时测得的数据,均分为用于学习与验证所用,而对于角度不对中(AM)、平行不对中(OM)、静不平衡(SU)、动不平衡(DU),由于测定了三种不同程度故障的信号,将严重、轻微程度故障时测得的数据用于学习,用中等故障程度的数据进行验证。
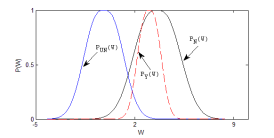
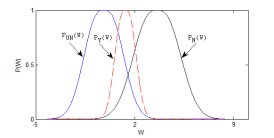
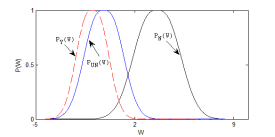
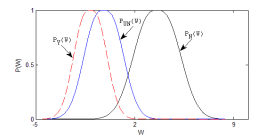
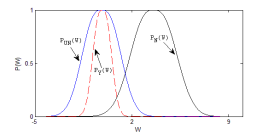
基于Fisher判别法判别与可能性理论相结合的状态辨识方法判定是否正常的结果如图3.10,表3.3是对应的诊断结果。
|
(a) |
(b) |
|
(c) |
(d) |
|
(e) |
图3.10 诊断结果
Fig.3.10 Results of fault diagnosis
表3.3 正常与否的状态辨识结果
Tab.3.3 Results of state identification for normal or not
|
图标号 |
输入数据状态 |
|
|
诊断结果 |
|
(a) |
正常(N) |
89.001% |
10.999% |
N |
|
(b) |
角度不对中(AM) |
39.158% |
60.842% |
UN |
|
(c) |
偏移不对中(OM) |
5.54% |
94.46% |
UN |
|
(d) |
静不平衡(SU) |
5.16% |
94.84% |
UN |
|
(e) |
动不平衡(DU) |
7.17% |
92.83% |
UN |
如表3.3辨识结果显示,该状态辨识方法正确判别了齿轮轴的各种状态,证明基于Fisher判别法和可能性理论的智能状态辨识方法的可行性。其优势可以总结为:
(1)通过特征参数的方法将特征信号表达,可以很好的用于状态智能判定,分频滤波和信号的多通道组合达到了最好的滤波效果,提高了诊断精确度;
(2)Fisher判别法解决了状态辨识过程中状态类别区分的问题,所提出的逐次诊断方法使包含多类异常状态的情况可以被逐一检测,简化了多分类问题。
(3)此智能状态辨识方法对包括主减速器在内的旋转设备的状态识别都有参考意义,可以用于主减速器系统的状态辨识。